
机器人相关电驱动与运动控制技术
2023-05-06
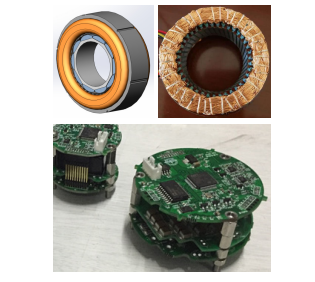
1)一体化集成关节电机与驱动控制技术
在电磁场及多维耦合场数值计算基础上,运用现代电机优化设计技术与高性能数字电机控制技术,实现高精度低力 矩波动、一体化嵌入式集成电机及运动控制系统。
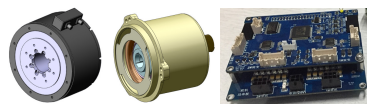
2)精密伺服电机与运动控制技术
通过电磁结构优化以及磁场波形优化,使电机具有极高的力矩密度和功率密度,同时又具有极低的定位力矩及力矩 波动性能,以满足从一般工业驱动到工业机器人高精度位置伺服等广泛应用。
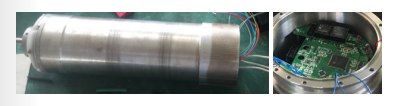
3)高功率密度电牵引与推动运动控制技术
运用现代电机优化设计技术与高性能磁场定向与弱磁控制技术,使电机同时具有高功率密度和宽广高效率运行区域, 实现高性能牵引或推动运动控制。
4)平面运动电机驱动控制与主动磁悬浮技术
通过平面直驱运动部件的直接控制,实现精密平面运动,简化系统结构,提高快速响应能力等。结合主动磁悬浮技术, 可以进一步适应环境及精度要求等。
5)精密直线运动电机与多自由度电机运动控制技术
不需要使用旋转电机方案以及所包括的螺杆和丝杠等在内的传动装置,采用音圈电机原理或永磁同步原理,实现精 密直线运动控制、或旋转与直线相结合的多自由度运动及控制,简化系统结构,实现高精度直线运动指标。
上一篇:
未知环境下机器人路径规划的关键技术