Search
EN
学院首页
学院概况
学院简介
学院领导
机构设置
党团工作
党的建设
团建工作
学生工作
师资队伍
教研团队
国际师资
行政人员
人才招聘
人才培养
学科建设
本科生培养
研究生培养
学科竞赛
实践教学
精品课程
科研实践
科研方向
研究机构
合作交流
企业合作交流
高校合作交流
招生就业
招生宣传
就业信息
就业指导
书记|院长信箱
智能机器人
秋冬春夏,伴随着四时的运行,青春和校 园融为一体,秋冬春夏,伴随着四和校园 融为一体。
科研方向
智能机器人
高端装备制造
半导体集成电路与精密仪器设备
激光与增材制造
研究机构
学院首页
/ 科研实践
/ 科研方向
/ 智能机器人
智能机器人
智能机器人协同、故障诊断、容错控制技术
1)智能机器人的建模 建模是设计控制算法的前提与基础,本课题组致力于对无人车、无人机、机械臂等智能机器人建立合理的网络化动力学模型,既能保证建模准确性,又能降低模型复杂度。 2)多智能体间的通讯协议 现代工业中的机器人多以多智能体的形式存在,我们不仅要设计控制算法,还要设计智能体之间的通讯协议。如何 保证智能体之间的一致性(同步)、自抗扰能力、以及减小网络时延产生的影响,是本课题组的重点研究内容之一...
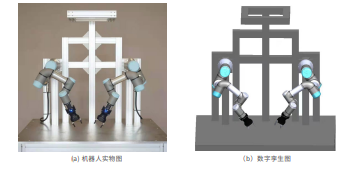
工业机器人集成应用技术
工业机器人集成应用技术是以工业机器人典型的自动装配、数控加工、电弧焊、去毛刺、打磨,喷涂、搬运码垛等应用系统为出发,集成 PLC 控制、视觉检测自动生产线等合并的技术。该技术通过构建机器人集成控制系统框架, 以通信稳定性和可靠性为原则研究 PLC 控制的机器人集成综合解决方案,实现按照用户指令完成人机交互动作,以及实现虚实联调的数字孪生
机器视觉识别检测技术
1)手绘图像识别技术 深圳市创客工场科技有限公司 (makeblock) 旗下产品“激光宝盒”使用了该技术,成功实现了智能材料识别与可视化操作功能。让激光切割机可以通过手绘自定义切割和雕刻,降低了激光切割机的使用门槛。 2)车载全景 360 环视技术 比亚迪宋系列车载多媒体应用该技术,实现车身周围 360°环视功能,并配有倒车辅助功能,该技术核心为图像拼接与车载镜头标定。
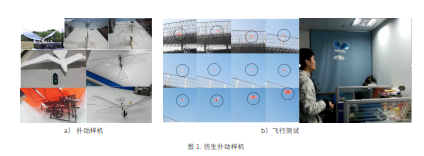
仿生扑翼飞行器
设计了不同类型的仿生扑动机构,并研制了多款仿生扑翼样机 ( 如图 1 所示 ),其中:八翼翅共轴布局的扑翼样机 具备在手柄控制模式下实现立式定点起飞能力;基于单曲柄双摆杆扑动 - 调节机构、扑动幅值可调的大尺寸(翼展约 45cm)仿蜻蜓扑翼样能够实现 5 分钟以上的滞空飞行。针对扑翼的气动特性开展了大量研究,主要围绕翼型参数、翅尖轨迹、非对称扑动和翅翼的主被动柔性变形等翼翅 扑动的关键参数,分析对扑翼气动力、能耗、...
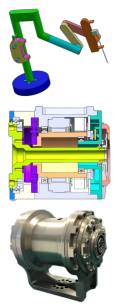
达芬奇手术机器人关键技术
医疗机器人市场前景广阔,国外产品难以进入中国市场。与此同时,代表医疗机器人顶尖技术的达芬奇手术机器人,由于专利保护过期,相关技术可直接使用。因此,目前是中国医疗机器人产业发展的黄金时期。 1)前期研究基础及成果 借鉴紧凑型设计理念,完成机械臂一体化关节设计,集成谐波三组件、无框电机二组件、中空编码器,满足协作机械臂和医疗机械臂结构紧凑、大功率密度 等要求。该成果已成功应用于医疗机器人,并授权香港一...
机器人灵巧操作与智能装配关键技术
面向智能制造领域,针对典型接插件的灵巧操作和智能装配问题,借助多模态信息融合的感知机制,研究机器人复杂操作工序的自主规划,完成装配序列的建模与优化,实现机器人的灵巧操作与智能自主装配。 1)前期研究基础及成果 (1) 多自由度机械臂目标物体精准对接 建立机械臂目标物体对接的模型,提出将视觉力觉融合的机械臂柔性控制器,通过视觉力觉信息的融合,保证机械臂精准插入,实现了机械臂对接的演示验证。成果以第一作者...
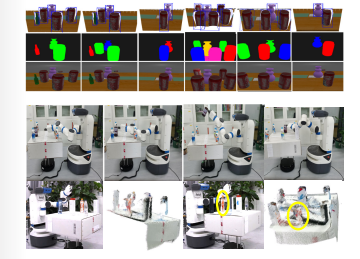
未知环境下机器人路径规划的关键技术
课题组主要研究机器人路径规划问题,包括机械臂路径规划和集群机器人路径规划。 1)现实动态环境下的机械臂路径规划 该课题采用深度强化学习机制来学习机械臂的避障控制策略并将其迁移到真实环境下。提出了一种基于统一化表示仿真和真实环境下物体的方法,使得机械臂在真实未知环境下,只需视觉 RGB-D 就可以避开障碍物到达目标。借助仿真和真实环境的统一表示,成功将仿真环境下机械臂的避障策略直接迁移到真实环境中,大幅提...
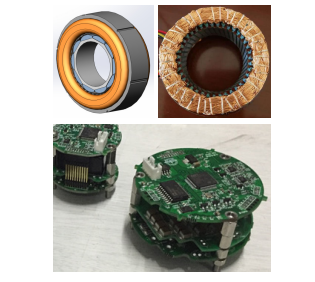
机器人相关电驱动与运动控制技术
1)一体化集成关节电机与驱动控制技术 在电磁场及多维耦合场数值计算基础上,运用现代电机优化设计技术与高性能数字电机控制技术,实现高精度低力 矩波动、一体化嵌入式集成电机及运动控制系统。 2)精密伺服电机与运动控制技术 通过电磁结构优化以及磁场波形优化,使电机具有极高的力矩密度和功率密度,同时又具有极低的定位力矩及力矩 波动性能,以满足从一般工业驱动到工业机器人高精度位置伺服等广泛应用。 3)高功率密度...