
智能机器人协同、故障诊断、容错控制技术
2026-05-15
1)智能机器人的建模
建模是设计控制算法的前提与基础,本课题组致力于对无人车、无人机、机械臂等智能机器人建立合理的网络化动力学模型,既能保证建模准确性,又能降低模型复杂度。

2)多智能体间的通讯协议
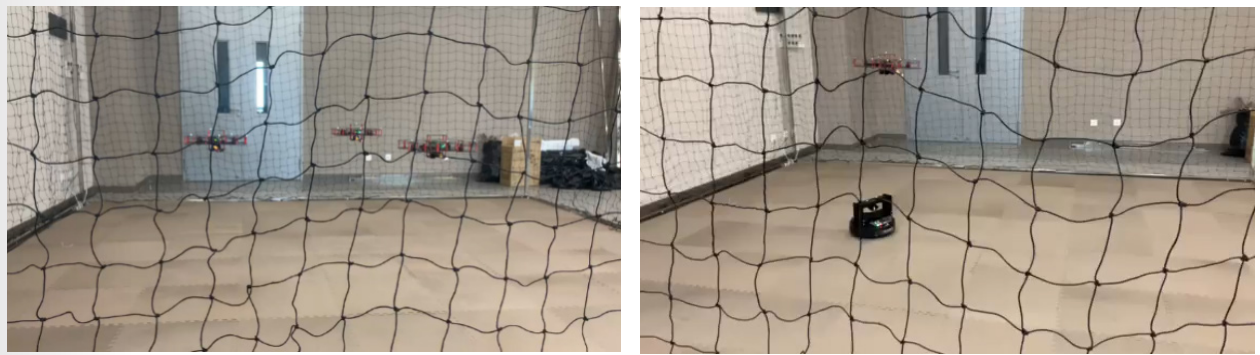
现代工业中的机器人多以多智能体的形式存在,我们不仅要设计控制算法,还要设计智能体之间的通讯协议。如何 保证智能体之间的一致性(同步)、自抗扰能力、以及减小网络时延产生的影响,是本课题组的重点研究内容之一。将人工智能与控制算法结合,建立计算机领域和自动化领域的桥梁也是本课题组的一个重要目标。

3)多智能体的分布式故障诊断
不依赖全局信息,只利用邻居智能体的可测信息,设计分布式故障诊断技术,实时观测系统的健康状况,获得丰富的故障信息。
4)多智能体的故障容错控制
设计与原有控制器兼容的故障容错算法,减小物理、通讯故障对系统的影响,使系统即使有故障也有可靠的输出。对大规模网络化系统,设计事件驱动机制下的容错控制算法,即提高系统可靠性,又能节约通讯成本。
下一篇:
工业机器人集成应用技术