
未知环境下机器人路径规划的关键技术
2023-05-06
课题组主要研究机器人路径规划问题,包括机械臂路径规划和集群机器人路径规划。
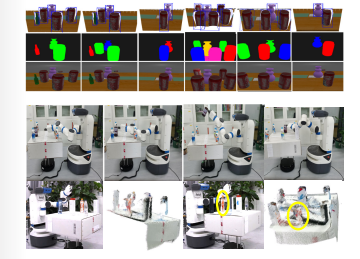
1)现实动态环境下的机械臂路径规划
该课题采用深度强化学习机制来学习机械臂的避障控制策略并将其迁移到真实环境下。提出了一种基于统一化表示仿真和真实环境下物体的方法,使得机械臂在真实未知环境下,只需视觉 RGB-D 就可以避开障碍物到达目标。借助仿真和真实环境的统一表示,成功将仿真环境下机械臂的避障策略直接迁移到真实环境中,大幅提高真实环境下机械臂避障的泛化性。
2)领航 - 跟随型多机器人编队成型及路径规划
该课题以领航 - 跟随型编队在线避障为研究对象,以移动机器人的在线避障规划与运动控制为切入点,主要开展领航机器人在线避障规划、跟随机器人协调避碰、运动控制器设计等。

3)应用领域
该课题设计了全自动化拆解机器人系统,含有两个三轴的机械臂、识别感知系统、机械臂路径规划系统、运动控制等。实现对废旧共享单车的全自动自动化拆解。不仅解决了大都市废旧共享单车的回收问题,同时也是贯彻落实“可持续发展”的战略的体现。

上一篇:
机器人灵巧操作与智能装配关键技术
下一篇:
机器人相关电驱动与运动控制技术