作者: 时间:2021-04-29 点击数:
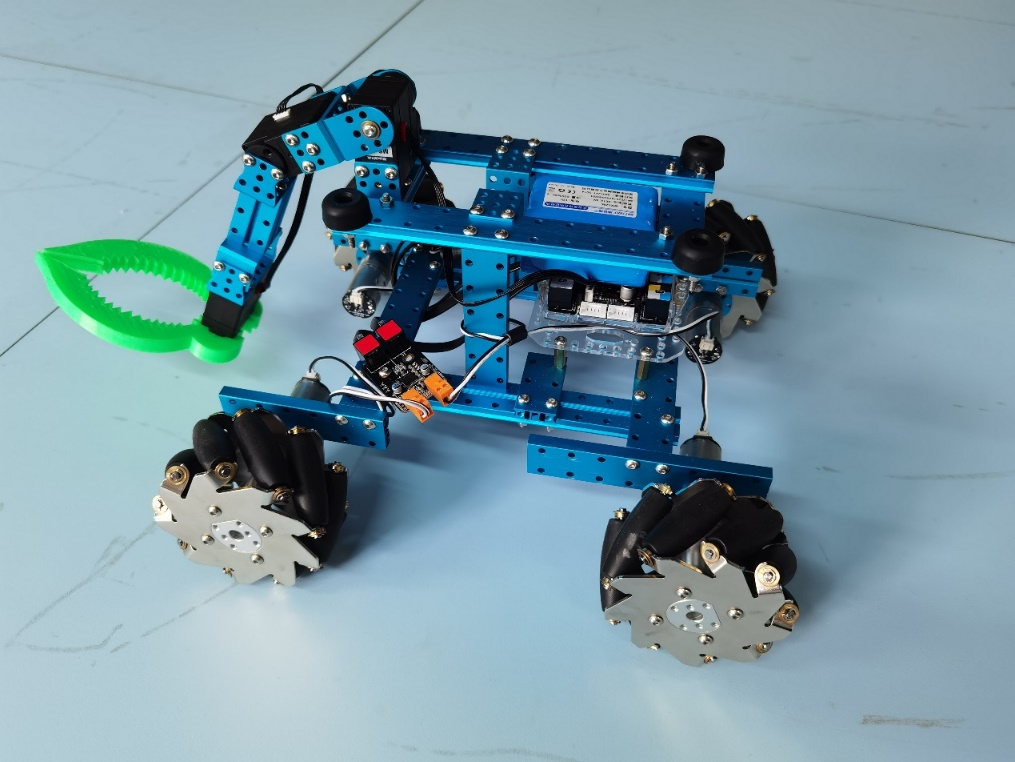
以《大学生工程训练综合能力竞赛》为背景,设计制作智能物料搬运机器人,完成竞赛题目要求的指定功能。作品采用Arduino ATMega2560控制板卡通过控制直流电机驱动4个麦克纳姆轮,实现平面的全自由度移动。同时控制舵机姿态实现指定物料的抓取工作。
智能物料搬运机器人实物图
(指导教师:房立存 苏伟宏 杨旭;学生:2018级机械设计制造及自动化 吴崇林等)
Copyright © 2018深圳技术大学 版权所有 粤ICP备16106131号