
仿生扑翼飞行器
2026-05-14
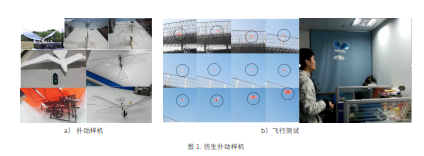
设计了不同类型的仿生扑动机构,并研制了多款仿生扑翼样机 ( 如图 1 所示 ),其中:八翼翅共轴布局的扑翼样机 具备在手柄控制模式下实现立式定点起飞能力;基于单曲柄双摆杆扑动 - 调节机构、扑动幅值可调的大尺寸(翼展约 45cm)仿蜻蜓扑翼样能够实现 5 分钟以上的滞空飞行。
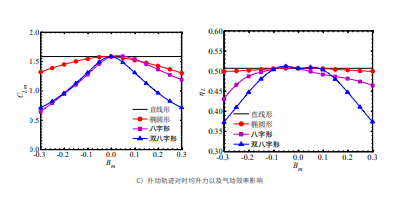
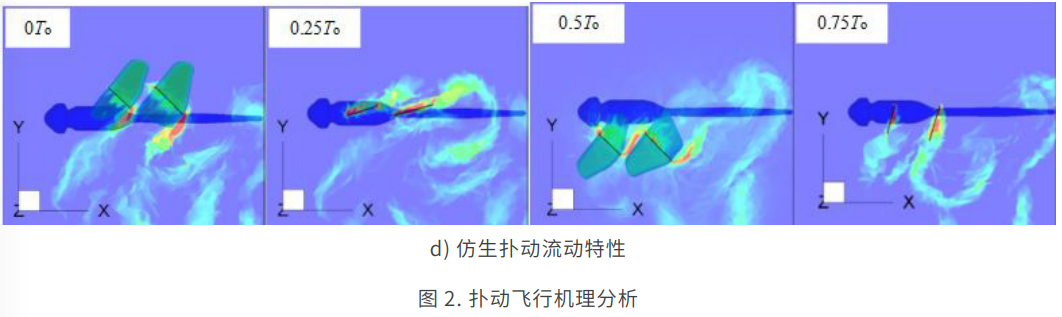
针对扑翼的气动特性开展了大量研究,主要围绕翼型参数、翅尖轨迹、非对称扑动和翅翼的主被动柔性变形等翼翅 扑动的关键参数,分析对扑翼气动力、能耗、以及飞行效率所产生的影响。相关成果发表于《Journal of Aerospace Engineering》、《航空学报》等国内外航空类知名期刊。
此外,针对扑翼直驱问题,目前正开展柔性驱动方面的研究。主要基于智能软材料及压电材料方面的研究,主要聚焦于大变形粘弹性、多物理场耦合特性、失效模式等性能表征,基于介电和压电驱动的智能末端执行器设计,以及柔性直驱的扑翼机器人设计与控制等。
上一篇:
机器视觉识别检测技术
下一篇:
达芬奇手术机器人关键技术