
窄足竞步机器人的设计与控制
2022-05-13
一、作品名称:窄足竞步机器人的设计与控制
二、指导老师:彭曙蓉
三、参与学生:罗曙华 黄鸿达 顾逸康 张贤庆 庄俊霖 蔡东鑫
四、作品来源:2018级机械《项目工作I-2》
五、项目简介
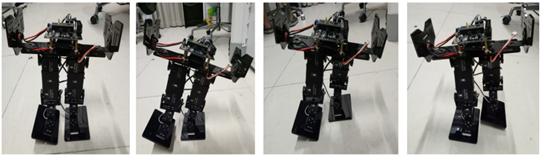
项目工作的题目为窄足竞步机器人的设计与控制,与单片机课程的理论学习同步进行。利用单片机开发板熟悉单片的的使用,为进一步实现单片机控制窄足机器人做准备。根据窄足机器人的构造选材、装配;采用PWM脉冲控制舵机动作;为正常行走规划机器人步态,实现前行、后退、前滚翻、后滚翻的开环控制;在保证机器人稳定动作的基础上提速。作品能顺利达到项目目标,动作控制流畅,体现了学生初步的结构设计能力以及对单片机知识的灵活运用能力。
六、实物照片
上一篇:
斯特林发动机的设计与制作
下一篇:
扎气球机器人