
扎气球机器人
2022-05-13
一、作品名称:扎气球机器人
二、指导老师:彭曙蓉
三、参与学生:郭泽翔 蔡定君 赵泓泽 张新培 胡逸凡
四、作品来源:2020级机械《项目工作I》
五、项目简介
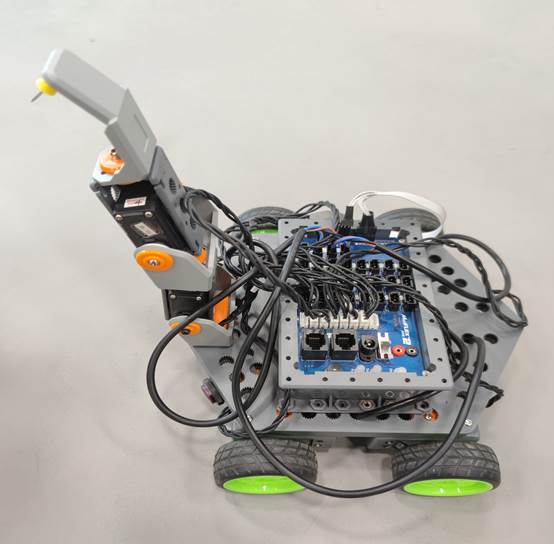
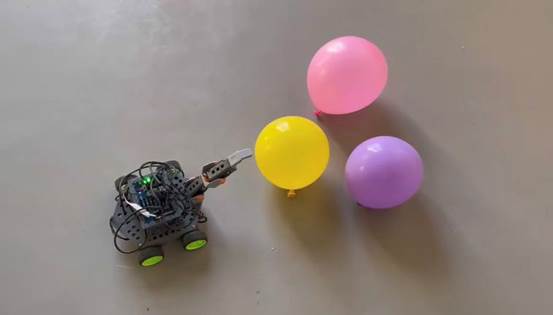
项目工作的题目为扎气球机器人,运用到了控制器、传感器、舵机、多功能调试器等硬件,还有程序控制软件。通过舵机来实现用来扎气球的多自由度的机械爪,以及通过舵机来控制机器人的自由移动。 利用红外光电传感器来精准感应待扎气球的位置,编写程序到控制器来控制机器人的自由移动及精准扎气球的动作。作品顺利达到项目目标,搭建完成一个可以自由移动,并且能够精准识别气球位置并根据设定好的程序做出相应动作的机器人。通过这个项目,我们能够对控制器、传感器、舵机、多功能调试器等硬件,还有程序控制软件的功能有更加深入的了解,同时,也会增加对机器人学习的
兴趣。
六、实物照片
七、成果材料
完成了扎气球机器人的搭建以及《扎气球机器人项目报告》。
上一篇:
窄足竞步机器人的设计与控制
下一篇:
轮式格斗机器人的设计与控制