
智能机器人灵巧操作平台
2022-05-13
一、作品名称:智能机器人灵巧操作平台
二、指导老师:马淦
三、参与学生:许梓淇 陈志明 方源 唐俊彦 李晴茹
四、作品来源:2019级机械《项目工作IV》
五、项目简介
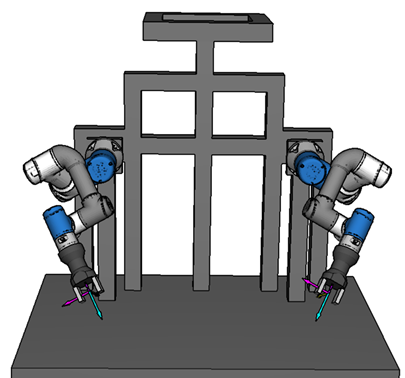
智能机器人灵巧操作平台,由数字孪生模块、智能感知模块、智能规划模块、运动控制模块组成,具有精度高、鲁棒性高等特性,实现非结构环境下目标物体任意初始位姿的分割、定位、抓取、装配等功能,应用于智能精密装配、空间在轨操作等场景。
六、实物照片

运动控制模块



智能感知模块
数字孪生模块
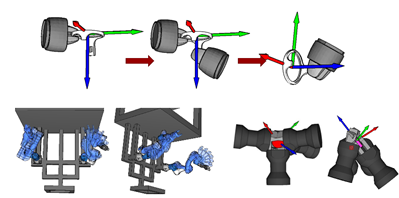
智能规划模块
上一篇:
基于树莓派的六足机器人
下一篇:
势能、热能驱动车