
近日,深圳技术大学中德智能制造学院机器人工程系副教授刘思聪,与南方科技大学机器人研究院院长、英国皇家工程院院士戴建生,南方科技大学硕士研究生吴彪,香港大学-南方科技大学联合培养博士研究生黄超逸合作研究,提出了机器鱼节律性肌肉激活机制的功率分配策略(Power Allocation Strategy, PAS),显著提升了机器鱼的推进性能和能效,在仿生推进领域取得了重要进展。相关研究成果以“Rhythm-based power allocation strategy of bionic tail-flapping for propulsion enhancement”为题,发表在机器人领域国际顶级期刊IEEE Transactions on Robotics 上。
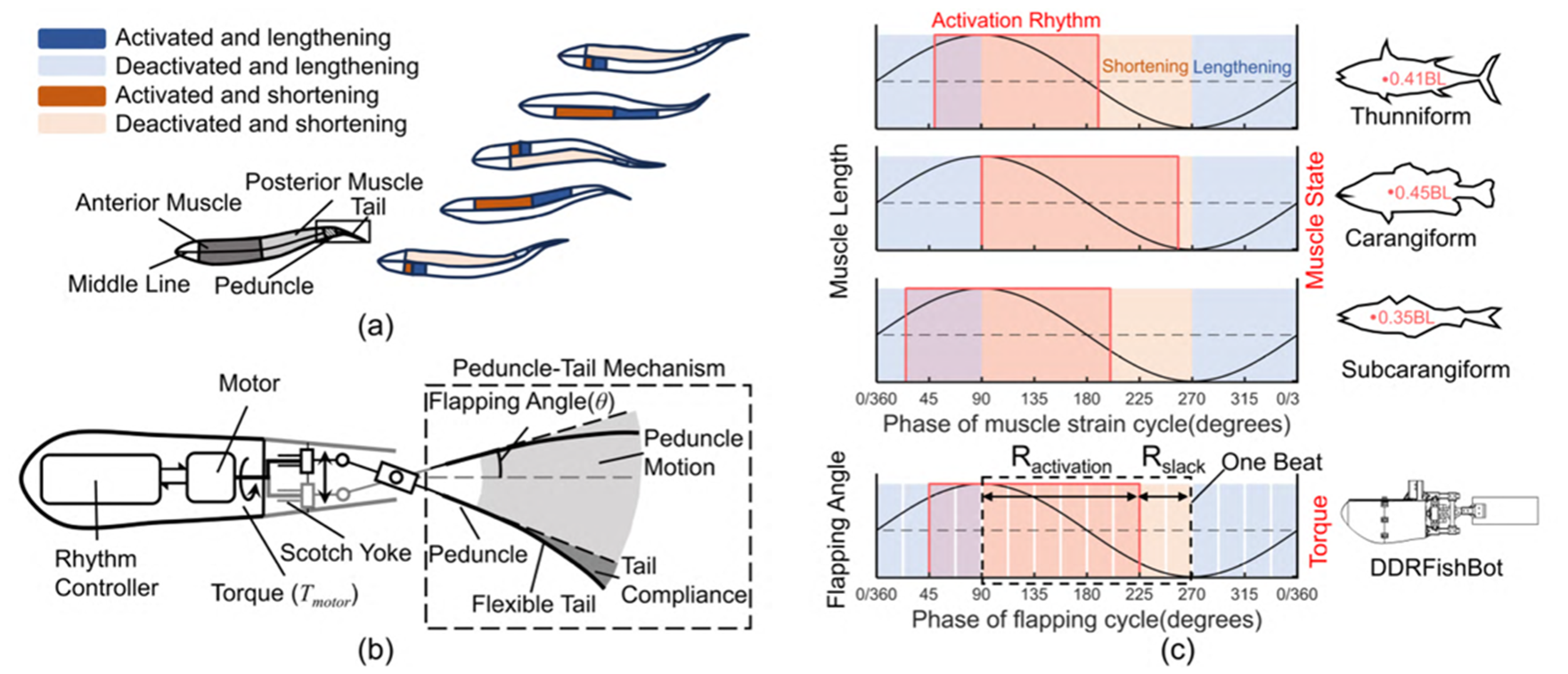
图1鱼类通过节律性地激活肌肉产生游泳运动和推进力,而仿生机器鱼DDRFishBot可在更宽范围内切换驱动模式
随着海洋勘探需求的激增,其广阔的空间和固有的流体阻力对水下无人设备在长距离巡航和载荷能力等方面的运动性能构成了重大挑战。研究人员们从水生动物中汲取灵感,期望通过对鱼类摆尾机制的模仿实现大范围的巡航作业和高效的性能释放。以游泳速度相对较快的硬骨鱼为例,其躯干和尾鳍(BCF)运动通过同步肌肉激活与尾部摆动来利用尾鳍的结构柔性进行弹性势能的储存和释放,从而增强肌肉机械能向流体推进能的转变。
受此启发,研究团队提出了一种模仿鱼类节律驱动模式的功率分配策略。该策略通过耦合尾柄运动-尾鳍变形来调节摆尾行为,使得尾部弹性势能(T-EPE)释放提高了228%,推进力提升了45.6%,效率系数提升了16.3%。作为前期的概念验证,团队成员通过该策略开发了BigBayFish,自2021年8月以来用22.16秒的成绩刷新并保持“50米最快游泳机器鱼”的吉尼斯世界纪录。
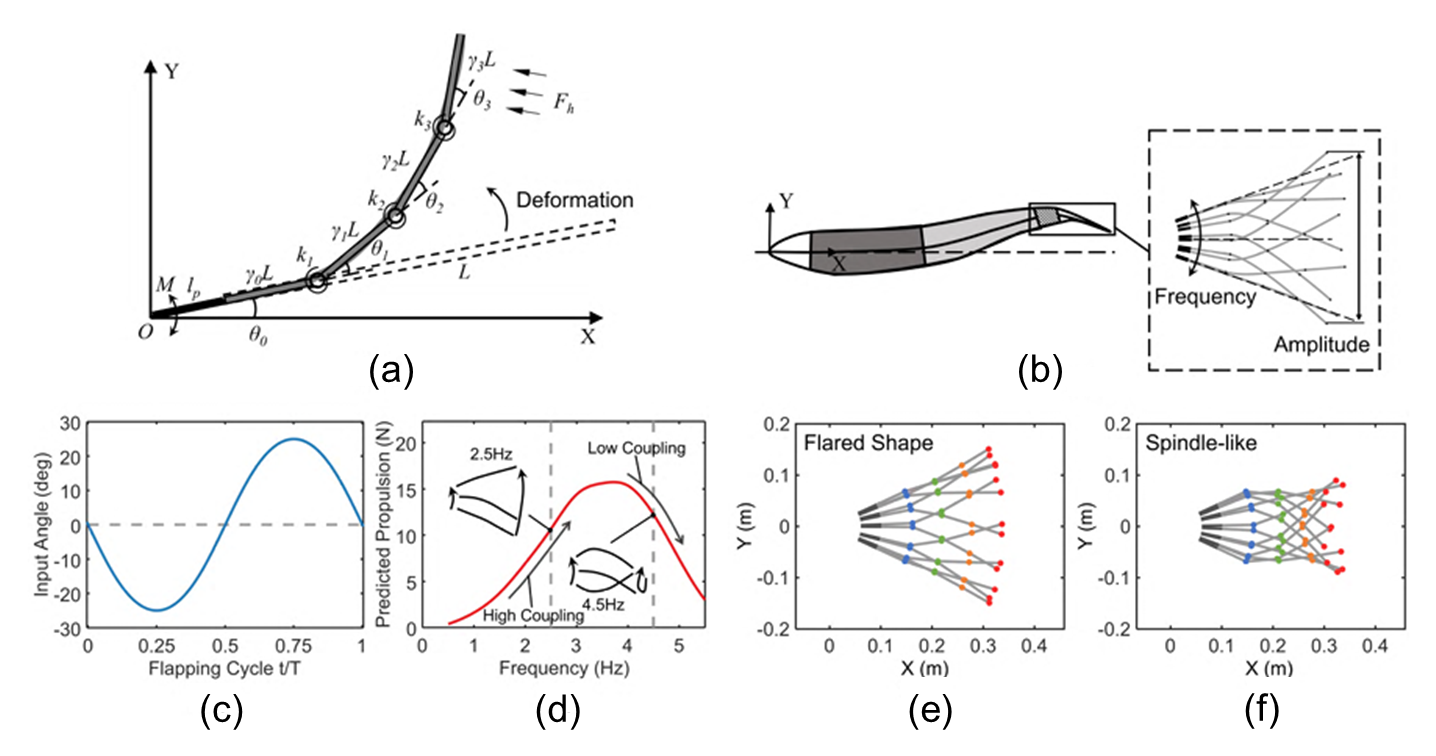
图2伪刚体模型示意图,及其预测的柔性尾鳍变形模式
为了系统评估节律功率分配策略在仿生推进系统中的作用,研究团队设计并制造了受尾柄-尾鳍机制启发的直接驱动型仿生鱼机器人,并与传统等功率均匀驱动策略进行了对比实验。结果表明,在等频率条件下,PAS显著提高了尾鳍摆动的弹性势能释放能力,尾部弹性势能(Tail-Elastic Potential Energy, T-EPE)提升高达228%,显示势能释放过程与驱动节律高度协同。在静态测试中,机器鱼的平均推进力较传统驱动方式提升45.6%,尾尖幅度增加36%,效率系数提升了16.3%。通过实验数据与二维计算流体动力学(CFD)的数值模拟,本工作验证了在摆尾过程中回弹行为可以激发更强的涡流,显著增加了向流体传递的动量。
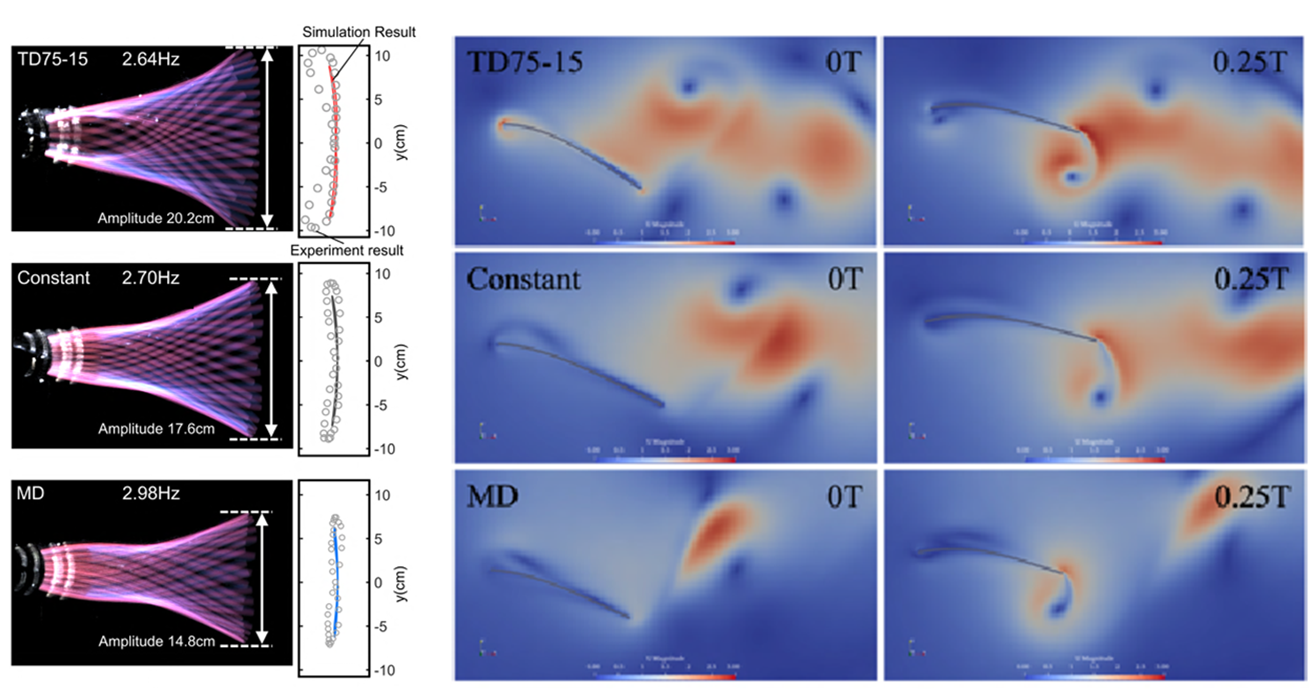
图3尾鳍在TD75-15、Constant与MD三种策略下产生的包络,以及对应的流体仿真分析
该工作首次系统性地提出节律激活机制与结构柔性结合应用于水下仿生推进系统,为未来低功耗、高效率、结构简洁型水下机器人提供了新范式。该策略具有高度的适应性与可拓展性,适用于深海巡视、复杂环境作业与海洋智能装备的关键推进模块。
本研究由深圳技术大学中德智能制造学院、南方科技大学机械与能源工程系、香港大学、深圳市智能机器人与柔性制造重点实验室完成。硕士研究生吴彪和博士研究生黄超逸为论文共同第一作者,戴建生院士、刘思聪副教授为论文共同通讯作者。本研究得到国家重点研发计划(2022YFB4701200),国家自然科学基金(52475302),深圳市科技计划(JCYJ20220530114615034、JCYJ20220818100417038、ZDSYS20220527171403009)等项目的资助。
论文链接:https://doi.org/10.1109/TRO.2025.3577985
中德智能制造学院
2025年6月26日

