
机器人灵巧操作与智能装配关键技术
2023-05-06
面向智能制造领域,针对典型接插件的灵巧操作和智能装配问题,借助多模态信息融合的感知机制,研究机器人复杂操作工序的自主规划,完成装配序列的建模与优化,实现机器人的灵巧操作与智能自主装配。
1)前期研究基础及成果
(1) 多自由度机械臂目标物体精准对接
建立机械臂目标物体对接的模型,提出将视觉力觉融合的机械臂柔性控制器,通过视觉力觉信息的融合,保证机械臂精准插入,实现了机械臂对接的演示验证。成果以第一作者发表在机器人领域知名国际会议 IEEE-ICRA(pp.1036-1041, 2014)
(2) 双臂协作线性柔性体智能装配
以双臂协作完成计算机电源线的装配为例,提出基于仿生的双臂协作线性柔性体装配的方法,创新性的设计了一款用于线性柔性体装配的机械手。部分成果已在机器人领域知名国际会议 IEEE-ICRA 2021 的专题研讨会(Workshop: BIMANUAL MANIPULATION: LEARNING, PLANNING AND CONTROL) 上发表。
2) 产业应用与技术服务
(1)产业应用
1)面向 3C 等行业的机械臂智能精密装配 ;
2)机械臂辅助激光全自动打标,包括空间中任意摆放位姿工件的打标以及对于线性柔性体的打标 ;
(2)技术服务
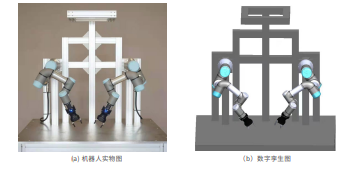
1) 定制机器人数字孪生系统(纯 Python 开发,不采用第三方软件,不使用 ROS 等第三方平台,可提供源代码)
上一篇:
达芬奇手术机器人关键技术
下一篇:
未知环境下机器人路径规划的关键技术