
轮式格斗机器人的设计与控制
2022-05-13
一、作品名称:轮式格斗机器人的设计与控制
二、指导老师:彭曙蓉 陈守军
三、参与学生:冯文静 李兴邦 张新宇 甘雨顺 李振元 玉建斌
四、作品来源:2021中国机器人大赛-武术擂台赛-自主仿人散打项目
五、项目简介
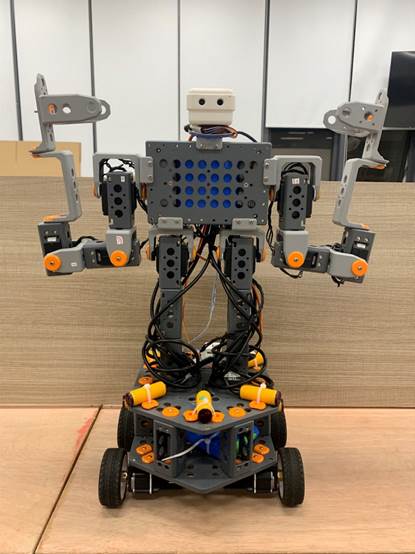
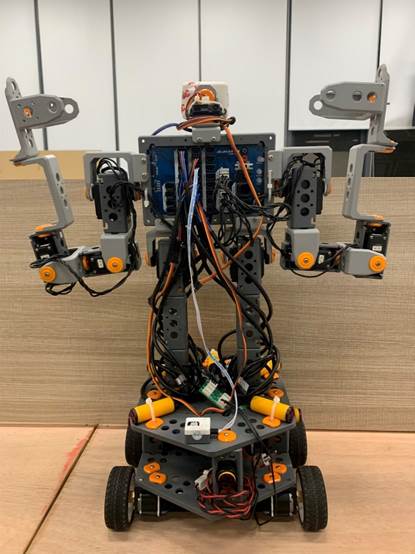
本作品是一个仿人并且用于擂台的散打机器人。使用现有的模块化配件,对机器人进行了结构上的设计并且将其拼装出来。根据使用逻辑将传感器的回传信号输入到IO或者AD口,并利用返回值对程序进行编写。机器人通过控制器分析、处理所收集的物体数据,能够判断自身位置、敌人在其的相对方位,能够自动地控制手臂与躯体结构做出相应的攻击动作,也能在被敌方击倒后能够自主快速起身。机器人需要完成登台、漫游、双方缠斗、倒地起身等情况。
六、实物照片
七、成果材料
2021中国机器人大赛三等奖。
上一篇:
扎气球机器人
下一篇:
基于树莓派的六足机器人