
The research group mainly studies robot path planning issues, including robotic arm path planning and swarm robot path planning.
1 ) Robotic arm path planning in realistic dynamic environment
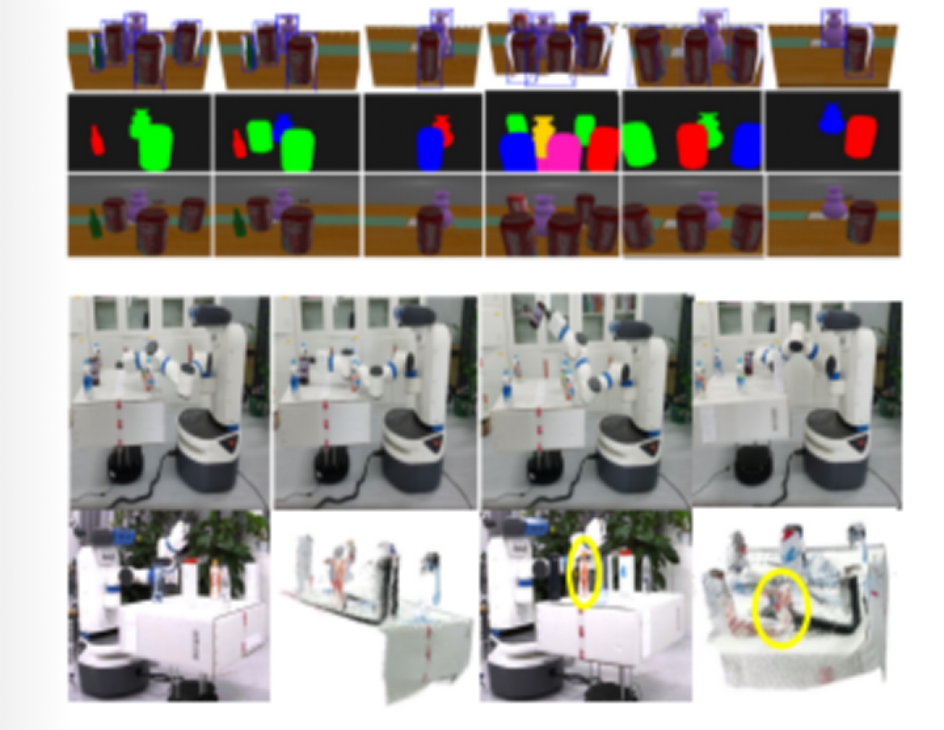
This topic uses a deep reinforcement learning mechanism to learn the obstacle avoidance control strategy of the robotic arm and transfer it to the real environment. A method based on unified representation of objects in simulation and real environments is proposed, so that the robotic arm can avoid obstacles and reach the target in a real unknown environment using only visual RGB-D . With the help of the unified representation of simulation and real environment, the obstacle avoidance strategy of the robot arm in the simulation environment has been successfully transferred directly to the real environment, greatly improving the generalization of the robot arm's obstacle avoidance in the real environment.
2 ) Pilot-follower multi-robot formation formation and path planning
This topic takes the leader - follower formation online obstacle avoidance as the research object, and takes the online obstacle avoidance planning and motion control of mobile robots as the entry point. It mainly carries out the online obstacle avoidance planning of the leader robot, the coordinated collision avoidance of the follower robot, and the design of motion controllers, etc. .
3 )Application fields
This project designed a fully automated disassembly robot system, including two three-axis robotic arms, a recognition and sensing system, a robotic arm path planning system, and motion control. Realize fully automatic dismantling of used shared bicycles. It not only solves the problem of recycling used shared bicycles in metropolitan areas, but also embodies the implementation of the " sustainable development " strategy.

Telephone:+86 755-23256198
Zip code:518118
Address:No. 3002, Lantian Road, Pingshan District, Shenzhen, Guangdong, China.

SZTU WeChat Public Account

SGIM WeChat Public Account
Copyright @SZTU