
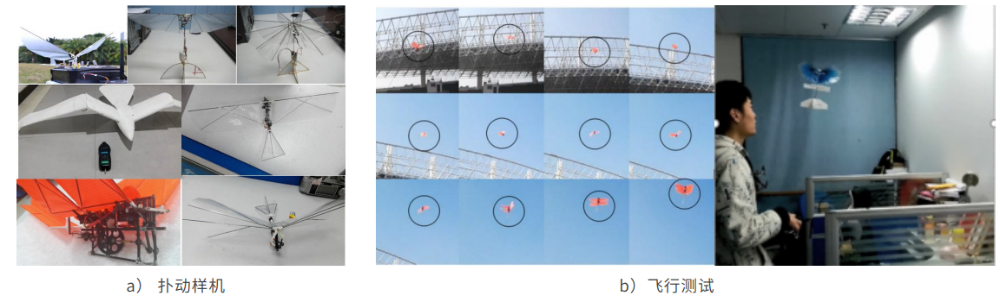
Different types of bionic flapping mechanisms have been designed, and a number of bionic flapping wing prototypes have been developed (as shown in Figure 1). Among them: the flapping wing prototype with an eight-wing coaxial layout has the ability to achieve vertical fixed-point takeoff in handle control mode. Ability, Based on a single-handle double-lever flapping-adjustment mechanism and adjustable flapping amplitude, the large-size (wingspan is about 45cm) imitation dragonfly flapping wings can achieve more than 5 minutes of airborne flight.
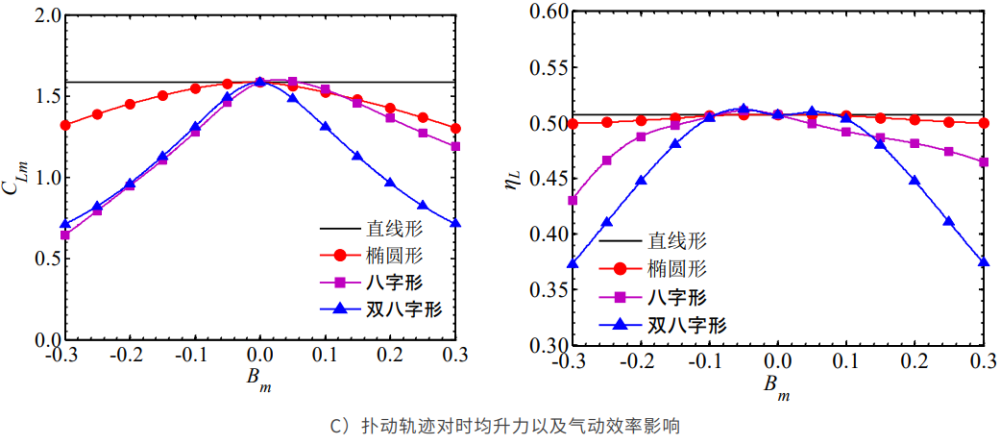
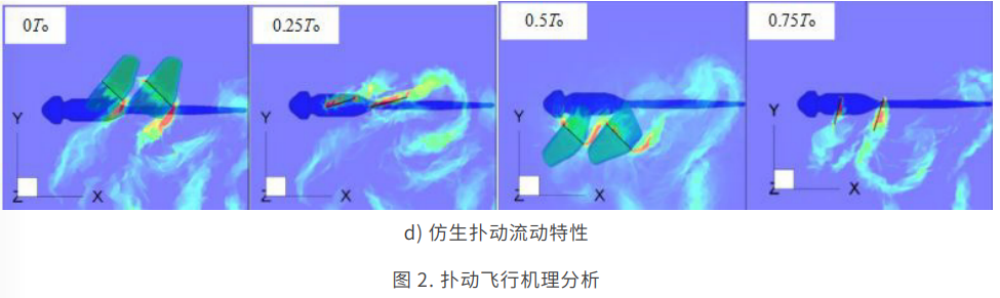
A large number of studies have been carried out on the aerodynamic characteristics of flapping wings, mainly focusing on the key parameters of wing flapping such as airfoil parameters, wing tip trajectory, asymmetric flapping and active and passive flexible deformation of the wings, and analyzed the aerodynamics and energy of flapping wings. consumption and flight efficiency. Relevant results have been published in well-known domestic and foreign aviation journals such as "Journal of Aerospace Engineering" and "Acta Aeronautica Sinica".
In addition, to address the problem of flapping wing direct drive, research on flexible drive is currently being carried out. Mainly based on research on smart soft materials and piezoelectric materials, focusing on performance characterization of large deformation viscoelasticity, multi-physics coupling characteristics, failure modes, intelligent end effector design based on dielectric and piezoelectric actuation, and flexible direct Design and control of driven flapping-wing robots.
Telephone:+86 755-23256198
Zip code:518118
Address:No. 3002, Lantian Road, Pingshan District, Shenzhen, Guangdong, China.

SZTU WeChat Public Account

SGIM WeChat Public Account
Copyright @SZTU